Estéban
COMBES
Ingénieur en électronique embarqué

Formations
2021 – 2018
Diplôme d’Ingénieur en Systèmes électriques et électroniques embarquées par apprentissage
EI.CESI – Toulouse
2018 – 2016
Diplôme Universitaire de Technologie (DUT) Génie Électrique et Informatique Industrielle (GEII)
Université Toulouse III- Paul Sabatier – Toulouse
Expériences professionnelle
Depuis 2021
Ingénieur en électronique embarqué chez Adentis
Depuis mon arrivée chez Adentis j’ai travaillé chez plusieurs clients,. J’ai acquis de l’expérience technique, une facilité d’intégration dans les équipes et des processus.
J’ai travaillé dans des domaines très différents tels que le ferroviaire ou le spatial.
Domaine Ferroviaire
- Rédaction de plans de tests
- Carte CPU + FPGA
- Carte de conversion d’énergie
- Campagne de tests
- Électronique
- Thermique
- EMC
- Recherche de solutions techniques suite à des problèmes de performances thermiques.
Domaine spatial
- Rédaction de plans tests
- Équipement
- Cartes processeur
- Campagne de tests
- Équipement avant livraison
- Cartes processeur
- Programmation script python pour les besoins de tests
- Conception de cartes processeurs
- Recherche et choix des composants
- Étude de faisabilité
- Réalisation schématique et routage
- Analyses électriques
- Rédaction des documentations techniques
2021 – 2018
Apprenti ingénieur en électronique embarqué chez Continental Automotive
Chez Continental j’ai eu plusieurs projets :
- Caractérisation de capteurs de position et de vitesse pour moteurs thermique
- Définition et réalisation des campagnes de tests
- Traitement des données
- Réalisation de rapports de tests
- Programmation d’un logiciel de génération de profil de vibration
- Définition de l’IHM
- Programmation du backend
- Récupération des informations de l’utilisateur
- Calcul automatique des positions pour vitesse dédiée
- Génération du fichier Excel pour lecture par le banc de test
- Conception d’une carte de contrôle pour moteur brushless
- Recherche et choix des composants
- Etude de faisabilité
- Réalisation schématique et routage
- Programmation du μC PIC18
- Définition du banc de test
- Réalisation des tests fonctionnels
2018 – 2017
Apprenti technicien en électronique embarqué chez DIEHL Aerospace
Chez DIEHL j’ai eu plusieurs projets :
- Réparation d’avionique de type FCU (Flight Control Unit) provenant des familles d’Airbus A320-A330.
- Diagnostic à l’aide de banc de test
- Réparation
- Tests
- Réparation de panne complexe sur FCU
- Diagnostic sur bancs de test et investigation sur carte
- Réparation
- Tests
- Création d’un guide pour détecter de futures pannes ayant la même origine
Compétences
Techniques
- Asservissement
- Conversion d’énergie (DC/DC)
- Circuits analogiques
- Circuits numériques
- Processeurs
- Communications
- RS-422
- LVDS (SpaceWire)
- UART
- SPI
- I²C
- CAN
- Mémoires
- SDRAM
- FLASH
- MRAM
- Filtrage numérique et analogique
- Traitement du signal
- Routages de cartes HDI (16 couches)
- Analyses Signal Integrity (SI)
- Analyses Power Integrity (PI)
- Placement
- Gestion des contraintes
- Temporelles
- Impédances
- Isolations
Langages de programmation
- Python
- VBA
Logiciels
- CR8000
- Cadstar
- Kicad
- Capture (Pspice)
- VS Code
- Solidworks
- Doors
- Reqtify
Mes projets personnels
Depuis toujours, je lance des projets personnels pour le plaisir d’apprendre et de créer, que ce soit en robotique, en électronique, en mécanique ou dans d’autres domaines techniques. Ce site est né de l’envie de partager avec le plus grand nombre ma passion.
Astro Monkeys – Club de robotique
Le club a pour objectif de concevoir et fabriquer un robot autonome afin de participer chaque année à la Coupe de France de Robotique.
Chaque année, un nouveau thème est dévoilé, imposant des contraintes techniques, stratégiques et mécaniques différentes. Les équipes disposent de plusieurs mois pour :
- Concevoir l’architecture mécanique du robot
- Développer l’électronique embarquée
- Programmer les stratégies autonomes
- Tester et optimiser les performances
L’objectif : réaliser un maximum d’actions en autonomie dans un temps imparti, face à une autre équipe.
Cette compétition est un véritable projet d’ingénierie complet, mêlant mécanique, électronique, informatique embarquée et gestion d’équipe.

J’ai intégré le club Astro Monkeys dès mon entrée au CESI et j’y suis resté actif pendant six années. Au cours de ce parcours, dont j’ai assuré la présidence, je me suis spécialisé dans les domaines suivants :
- Conception mécanique et prototypage : Étude et réalisation de pièces, maîtrise de l’impression 3D.
- Stratégie et performance : Tests et optimisation de la stratégie de jeu du robot.
- Gestion et transmission : Amélioration des processus internes et formation des nouveaux membres.
- Électronique et automatisme : Conception de cartes électroniques et pilotage de servomoteurs.
La conception de cartes électroniques a été un sujet de longue haleine, du fait que les cartes doivent pouvoir être utilisées par le club pendant plusieurs années et suivre l’évolution et la complexité des nouveaux thèmes.
Il a donc fallu faire une étude pour lister les besoins et les contraintes pour ces projets.
Les besoins étaient les suivants:
- Modularité
- Possibilité de rajouter de nouvelles cartes sans reprendre le design complet
- Utilisation de plusieurs types de servo moteurs
- Liens de communications (UART/PWM)
- Tensions d’alimentations différentes
- Ajout de protections contre les surtensions et inversion de polarité
Les contraintes étaient multiples :
- μC compatible la génération précédemment utilisée
- S’intégrer dans le système de communication du robot (CAN)
- Tension d’entrée de 15V
- Encombrements restreint
La solution technique apportée pour la modularité du système est de faire en sorte que les cartes filles puissent se chaîner et communiquer sur des bus partager. Ainsi si les besoins d’entrées/sorties évoluent, le développement de nouvelles cartes se limitera aux ajouts de nouvelles fonctionnalités (capteurs de couleurs, de position, etc).
Suite à cette étude, il en est ressorti que la priorité était de concevoir deux cartes.
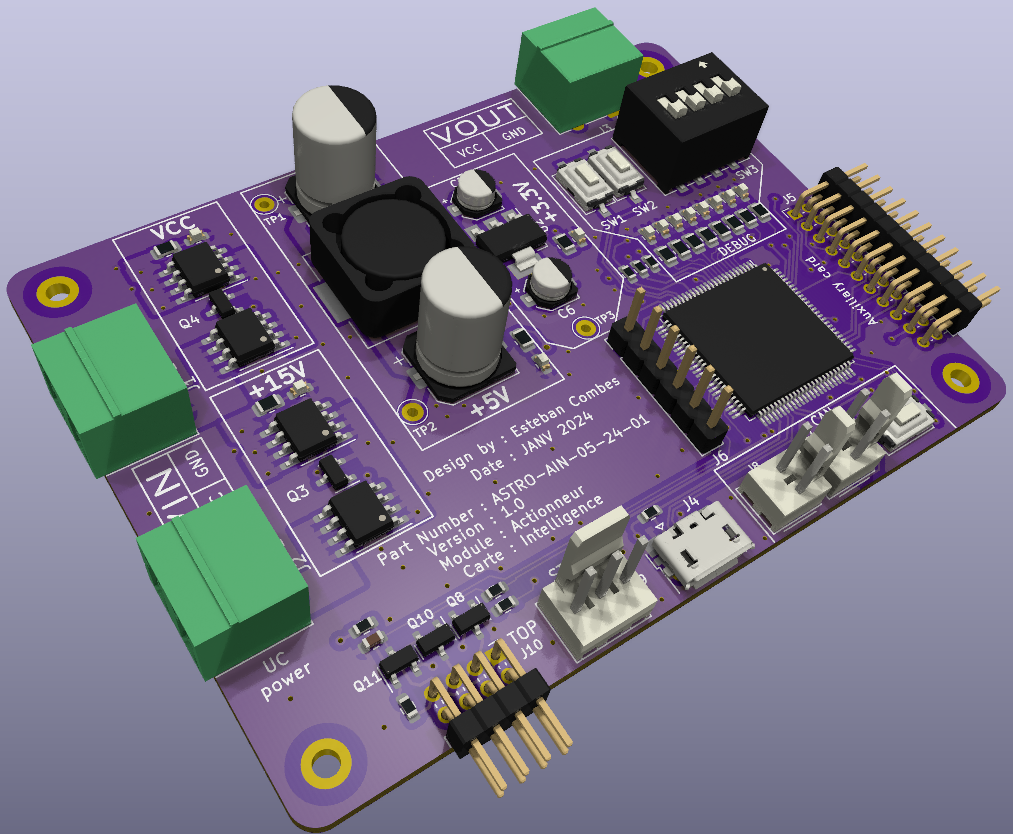
Une première carte microcontrôleur qui fait l’interface avec le système de gestion du robot à travers un bus CAN, récupère les états des systèmes de configurations et autres entrées et sorties nécessaires pour le bon fonctionnement du robot. Cette carte doit également commander des cartes filles à travers des IOs ou des bus de communications (UART, SPI, I²C)
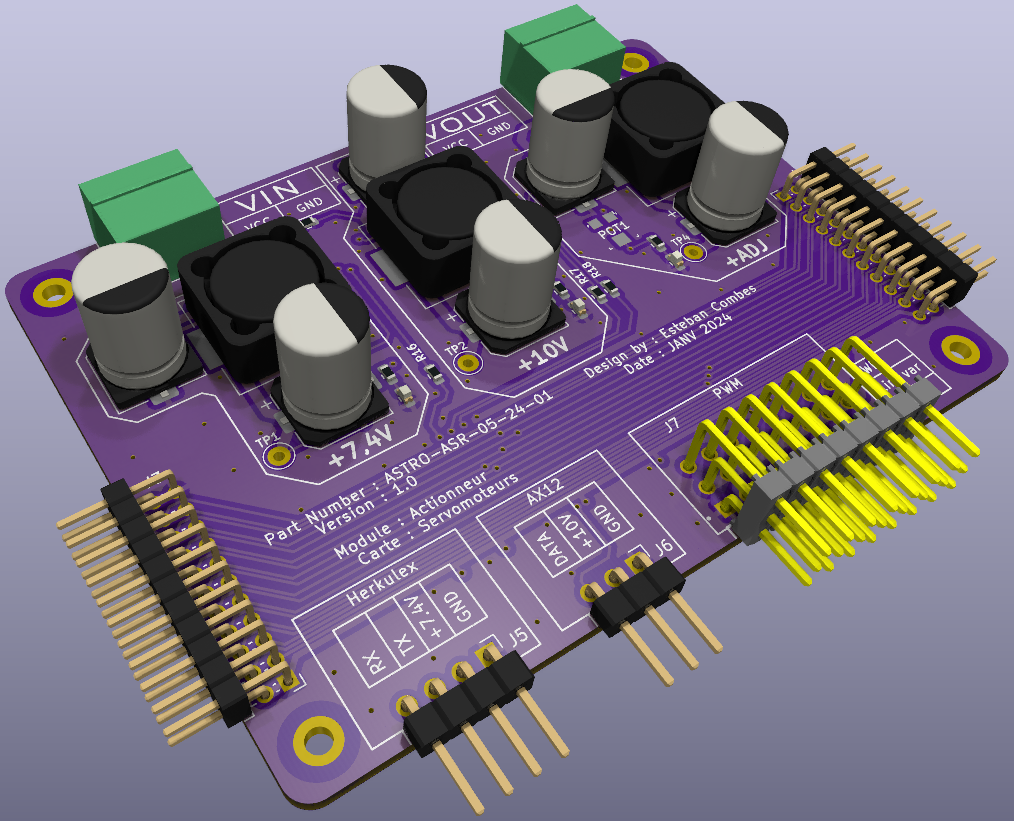
La deuxième carte est une carte servomoteur qui embarque trois convertisseurs de tensions et des sorties individuelles pour commander trois types de servomoteurs (Herkulex, AX-12, PWM). Elle a également pour fonction de transmettre les bus de communications et ainsi permettre le chainage de cartes.
Les projets Open source
Mes autres projets personnels que je souhaites partager sont disponibles ici :
-
OrthoCard
Orthocard est une application développée sous Word VBA destinée aux orthophonistes, permettant de générer automatiquement des cartes de mots à partir d’une liste et de faire de la mise en forme de texte. Le projet combine automatisation logicielle et ergonomie métier pour simplifier la création de supports pédagogiques personnalisés.
-
FluiDepth
Welcome to WordPress. This is your first post. Edit or delete it, then start writing! Lewis Hine Lewis W. Hine a étudié la sociologie avant de déménager à New York en 1901 pour travailler à l’École de culture éthique, où il a commencé à pratiquer la photographie pour améliorer ses méthodes d’enseignement. Instagram X TikTok…